Top
导言
原本是想写些网站建设的计划(但别人关心的只是他们搜索的内容)。所以就讲讲所在的团队吧(每个人都关心自己的下一站在哪里)
导言
原本是想写些网站建设的计划(但别人关心的只是他们搜索的内容)。所以就讲讲所在的团队吧(每个人都关心自己的下一站在哪里)
导言
Follow学术大牛, 和阅读前沿技术博客 是科研探索的乐趣所在。
常见的问题:
主要原因是头文件的include的使用不同,还有一些接口的改变。
$ make obj-intel64/inscount0.so
g++
# Warning Options
-Wall -Werror -Wno-unknown-pragmas -Wno-dangling-pointer
# Program Instrumentation Options
-fno-stack-protector
# Code-Gen-Options
-fno-exceptions -funwind-tables -fasynchronous-unwind-tables -fPIC
# C++ Dialect
-fabi-version=2 -faligned-new -fno-rtti
# define
-DPIN_CRT=1 -DTARGET_IA32E -DHOST_IA32E -DTARGET_LINUX
# include
-I../../../source/include/pin
-I../../../source/include/pin/gen
-isystem /staff/shaojiemike/Download/pin-3.28-98749-g6643ecee5-gcc-linux/extras/cxx/include
-isystem /staff/shaojiemike/Download/pin-3.28-98749-g6643ecee5-gcc-linux/extras/crt/include
-isystem /staff/shaojiemike/Download/pin-3.28-98749-g6643ecee5-gcc-linux/extras/crt/include/arch-x86_64
-isystem /staff/shaojiemike/Download/pin-3.28-98749-g6643ecee5-gcc-linux/extras/crt/include/kernel/uapi
-isystem /staff/shaojiemike/Download/pin-3.28-98749-g6643ecee5-gcc-linux/extras/crt/include/kernel/uapi/asm-x86
-I../../../extras/components/include
-I../../../extras/xed-intel64/include/xed
-I../../../source/tools/Utils
-I../../../source/tools/InstLib
# Optimization Options
-O3 -fomit-frame-pointer -fno-strict-aliasing
-c -o obj-intel64/inscount0.o inscount0.cpp
g++ -shared -Wl,--hash-style=sysv ../../../intel64/runtime/pincrt/crtbeginS.o -Wl,-Bsymbolic -Wl,--version-script=../../../source/include/pin/pintool.ver -fabi-version=2
-o obj-intel64/inscount0.so obj-intel64/inscount0.o
-L../../../intel64/runtime/pincrt
-L../../../intel64/lib
-L../../../intel64/lib-ext
-L../../../extras/xed-intel64/lib
-lpin -lxed ../../../intel64/runtime/pincrt/crtendS.o -lpindwarf -ldl-dynamic -nostdlib -lc++ -lc++abi -lm-dynamic -lc-dynamic -lunwind-dynamic
对应的makefile规则在source/tools/Config/makefile.default.rules
# Build the intermediate object file.
$(OBJDIR)%$(OBJ_SUFFIX): %.cpp
$(CXX) $(TOOL_CXXFLAGS) $(COMP_OBJ)$@ $<
# Build the tool as a dll (shared object).
$(OBJDIR)%$(PINTOOL_SUFFIX): $(OBJDIR)%$(OBJ_SUFFIX)
$(LINKER) $(TOOL_LDFLAGS) $(LINK_EXE)$@ $< $(TOOL_LPATHS) $(TOOL_LIBS)
UINT64 undefined bug: inscount0.cpp include pin.H which includes types_foundation.PH由于old pintool 基于 pin2.14。作为对比也分析inscount0.so的编译过程
g++
# Warning Options
-Wall -Werror -Wno-unknown-pragmas
# Program Instrumentation Options
-fno-stack-protector
# Code-Gen-Options
-fPIC
# define
-DBIGARRAY_MULTIPLIER=1 -DTARGET_IA32E -DHOST_IA32E -DTARGET_LINUX
-I../../../source/include/pin
-I../../../source/include/pin/gen
-I../../../extras/components/include
-I../../../extras/xed-intel64/include
-I../../../source/tools/InstLib
# Optimization Options
-O3 -fomit-frame-pointer -fno-strict-aliasing
-c -o obj-intel64/inscount0.o inscount0.cpp
同时multipim 的scons的编译细节如下,去除与pin无关的参数:
g++
# Warning Options
-Wall -Wno-unknown-pragmas
# c++ language
-std=c++0x
# Code-Gen-Options
-fPIC
# debug
-g
# Program Instrumentation Options
-fno-stack-protector
# Preprocessor Options ???TODO:
-MMD
# machine-dependent
-march=core2
# C++ Dialect
-D_GLIBCXX_USE_CXX11_ABI=0
-fabi-version=2
# define
-DBIGARRAY_MULTIPLIER=1 -DUSING_XED
-DTARGET_IA32E -DHOST_IA32E -DTARGET_LINUX
-DPIN_PATH="/staff/shaojiemike/github/MultiPIM_icarus0/pin/intel64/bin/pinbin" -DZSIM_PATH="/staff/shaojiemike/github/MultiPIM_icarus0/build/opt/libzsim.so" -DMT_SAFE_LOG
-Ipin/extras/xed-intel64/include
-Ipin/source/include/pin
-Ipin/source/include/pin/gen
-Ipin/extras/components/include
# Optimization Options
-O3 -funroll-loops -fomit-frame-pointer
-c -o build/opt/simple_core.os build/opt/simple_core.cpp
对比后,pin3.28 相对 pin2.14 编译时,
-DPIN_CRT=1// pin/extras/crt/include/freebsd/3rd-party/include/elf.h
> typedef uint16_t Elf32_Section;
> typedef uint16_t Elf64_Section;
// /usr/include/wordexp.h
remove __THROW
First apply the two change to old pintool
暂无
暂无
上面回答部分来自ChatGPT-3.5,没有进行正确性的交叉校验。
无
Pin 是一个动态二进制插桩工具:
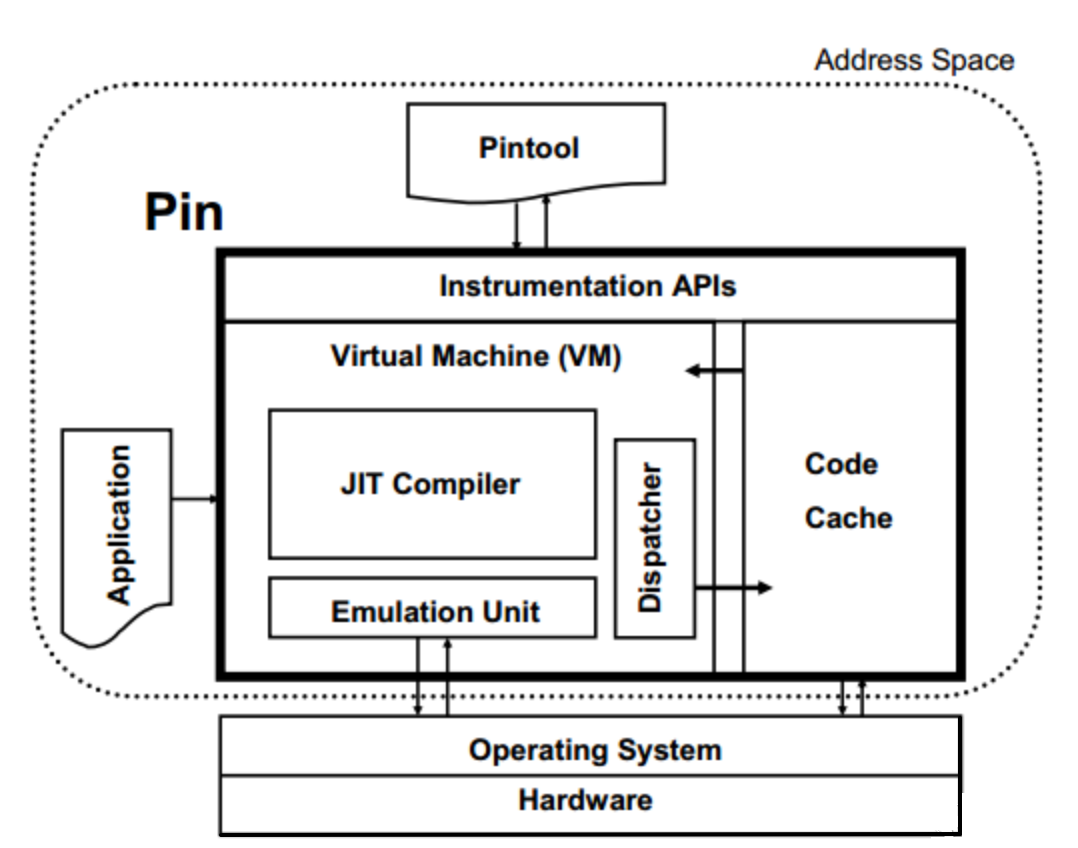
Pin机制类似Just-In-Time (JIT) 编译器,Trace插桩的基本流程(以动态基本块BBLs为分析单位):
通过一个例子来说明动态基本块BBLs与 汇编代码的BB的区别
switch(i)
{
case 4: total++;
case 3: total++;
case 2: total++;
case 1: total++;
case 0:
default: break;
}
上述代码会编译成下面的汇编, 对于实际执行时跳转从.L7进入的情况,BBLs包括四条指令,但是BB只会包括一条。
Pin会将cpuid, popf and REP prefixed 指令在执行break 成很多BBLs,导致执行的基本块比预想的要多。(主要原因是这些指令有隐式循环,所以Pin会将其拆分成多个BBLs)
kit from Intel websiteThis part is always needed by pintool, for example Zsim, Sniper.
When you meet the following situation, you should consider update your pin version even you can ignore this warning by use flags like -ifeellucky under high compatibility risk.
shaojiemike@snode6 ~/github/ramulator-pim/zsim-ramulator/pin [08:05:47]
> ./pin
E: 5.4 is not a supported linux release
because this will easily lead to the problem
PIN_Init之前调用PIN_InitSymbols。for (SEC sec = IMG_SecHead(img); SEC_Valid(sec); sec = SEC_Next(sec))
{
for (RTN rtn = SEC_RtnHead(sec); RTN_Valid(rtn); rtn = RTN_Next(rtn))
{
// Prepare for processing of RTN, an RTN is not broken up into BBLs,
// it is merely a sequence of INSs
RTN_Open(rtn);
for (INS ins = RTN_InsHead(rtn); INS_Valid(ins); ins = INS_Next(ins))
{
count++;
}
// to preserve space, release data associated with RTN after we have processed it
RTN_Close(rtn);
}
}
最重要的是
TRACE_AddInstrumentFunction Add a function used to instrument at trace granularityINS_AddInstrumentFunction() Add a function used to instrument at instruction granularityIMG_AddInstrumentFunction() Use this to register a call back to catch the loading of an imageINS_InsertPredicatedCall()// Forward pass over all instructions in bbl
for( INS ins= BBL_InsHead(bbl); INS_Valid(ins); ins = INS_Next(ins) )
// Forward pass over all instructions in routine
for( INS ins= RTN_InsHead(rtn); INS_Valid(ins); ins = INS_Next(ins) )
// Visit every basic block in the trace
for (BBL bbl = TRACE_BblHead(trace); BBL_Valid(bbl); bbl = BBL_Next(bbl))
{
// Insert a call to docount before every bbl, passing the number of instructions
BBL_InsertCall(bbl, IPOINT_BEFORE, (AFUNPTR)docount, IARG_UINT32, BBL_NumIns(bbl), IARG_END);
}
UINT32 memOperands = INS_MemoryOperandCount(ins);
// Iterate over each memory operand of the instruction.
for (UINT32 memOp = 0; memOp < memOperands; memOp++){
if (INS_MemoryOperandIsRead(ins, memOp)||INS_MemoryOperandIsWritten(ins, memOp)
//xxx
}
最重要的是
示例分析
// IPOINT_BEFORE 时运行的分析函数
VOID printip(VOID* ip) { fprintf(trace, "%p\n", ip); }
// Pin calls this function every time a new instruction is encountered
VOID InstructionFuc(INS ins, VOID* v)
{
// Insert a call to printip before every instruction, and pass it the IP
// IARG_INST_PTR:指令地址 一类的全局变量???
INS_InsertCall(ins, IPOINT_BEFORE, (AFUNPTR)printip, IARG_INST_PTR, IARG_END);
}
int main(int argc, char* argv[])
{
// Initialize pin
if (PIN_Init(argc, argv)) return Usage();
// 登记InstructionFuc为以指令粒度插桩时每条指令触发的函数
INS_AddInstrumentFunction(InstructionFuc, 0);
// 登记PrintFuc为程序结束时触发的函数
PIN_AddFiniFunction(PrintFuc, 0);
// 部署好触发机制后开始运行程序
PIN_StartProgram();
return 0;
}
目标:以样例插桩工具的源码为对象,熟悉pin的debug流程。
以官方教程为例子:
uname -a #intel64
cd source/tools/ManualExamples
# source/tools/Config/makefile.config list all make option
make all OPT=-O0 DEBUG=1 TARGET=intel64 |tee make.log|my_hl
# or just select one: make obj-intel64/inscount0.so
# $(OBJDIR)%$(PINTOOL_SUFFIX) - Default rule for building tools.
# Example: make obj-intel64/mytool.so
测试运行
下面介绍Pin 提供的debug工具:
首先创建所需的-g的stack-debugger.so和应用fibonacci.exe
其中OPT=-O0选项来自官方文档Using Fast Call Linkages小节,说明需要OPT=-O0选项来屏蔽makefile中的-fomit-frame-pointer选项,使得GDB能正常显示stack trace(函数堆栈?)
$ ../../../pin -appdebug -t obj-intel64/stack-debugger.so -- obj-intel64/fibonacci.exe 1000
Application stopped until continued from debugger.
Start GDB, then issue this command at the prompt:
target remote :33030
使用pin的-appdebug选项,在程序第一条指令前暂停,并启动debugger窗口。在另一个窗口里gdb通过pid连接:
$ gdb fibonacci #如果没指定应用obj-intel64/fibonacci.exe
(gdb) target remote :33030 #连接gdb端口
(gdb) file obj-intel64/fibonacci.exe #如果没指定应用, 需要指定程序来加载symbols
(gdb) b main #continue 等正常操作
能够在上一小节的debug窗口里,通过自定义debug指令打印自定义程序相关信息(比如当前stack使用大小)
Pintool “stack-debugger” 能够监控每条分配stack空间的指令,并当stack使用达到阈值时stop at a breakpoint。
这功能由两部分代码实现,一个是插桩代码,一个是分析代码。
static VOID Instruction(INS ins, VOID *)
{
if (!EnableInstrumentation) // ROI(Region of interest)开始插桩测量
return;
if (INS_RegWContain(ins, REG_STACK_PTR)) //判断指令是不是会改变stack指针(allocate stack)
{
IPOINT where = IPOINT_AFTER;
if (!INS_IsValidForIpointAfter(ins))
where = IPOINT_TAKEN_BRANCH; //寻找stack空间判断函数插入位置(指令执行完的位置)。如果不是after, 就是taken branch
INS_InsertIfCall(ins, where, (AFUNPTR)OnStackChangeIf, IARG_REG_VALUE, REG_STACK_PTR,
IARG_REG_VALUE, RegTinfo, IARG_END); // 插入OnStackChangeIf函数,如果OnStackChangeIf()返回non-zero, 执行下面的DoBreakpoint函数
INS_InsertThenCall(ins, where, (AFUNPTR)DoBreakpoint, IARG_CONST_CONTEXT, IARG_THREAD_ID, IARG_END);
}
}
所需的两个函数的分析代码如下:
static ADDRINT OnStackChangeIf(ADDRINT sp, ADDRINT addrInfo)
{
TINFO *tinfo = reinterpret_cast<TINFO *>(addrInfo);
// The stack pointer may go above the base slightly. (For example, the application's dynamic
// loader does this briefly during start-up.)
//
if (sp > tinfo->_stackBase)
return 0;
// Keep track of the maximum stack usage.
//
size_t size = tinfo->_stackBase - sp;
if (size > tinfo->_max)
tinfo->_max = size; //更新stack使用大小
// See if we need to trigger a breakpoint.
//
if (BreakOnNewMax && size > tinfo->_maxReported)
return 1;
if (BreakOnSize && size >= BreakOnSize)
return 1;
return 0;
}
static VOID DoBreakpoint(const CONTEXT *ctxt, THREADID tid)
{
TINFO *tinfo = reinterpret_cast<TINFO *>(PIN_GetContextReg(ctxt, RegTinfo));
// Keep track of the maximum reported stack usage for "stackbreak newmax".
//
size_t size = tinfo->_stackBase - PIN_GetContextReg(ctxt, REG_STACK_PTR);
if (size > tinfo->_maxReported)
tinfo->_maxReported = size;
ConnectDebugger(); // Ask the user to connect a debugger, if it is not already connected.
// Construct a string that the debugger will print when it stops. If a debugger is
// not connected, no breakpoint is triggered and execution resumes immediately.
//
tinfo->_os.str("");
tinfo->_os << "Thread " << std::dec << tid << " uses " << size << " bytes of stack.";
PIN_ApplicationBreakpoint(ctxt, tid, FALSE, tinfo->_os.str());
}
OnStackChangeIf函数监控当前的stack使用并判断是否到达阈值。DoBreakpoint函数连接debugger窗口,然后触发breakpoint,并打印相关信息。
也可以使用-appdebug_enable参数,取消在第一条指令前开启GDB窗口的功能,而是在触发如上代码的break时,才开启GDB窗口的连接。
而上述代码中的ConnectDebugger函数实现如下:
static void ConnectDebugger()
{
if (PIN_GetDebugStatus() != DEBUG_STATUS_UNCONNECTED) //判断是不是已有debugger连接
return;
DEBUG_CONNECTION_INFO info;
if (!PIN_GetDebugConnectionInfo(&info) || info._type != DEBUG_CONNECTION_TYPE_TCP_SERVER) //PIN_GetDebugConnectionInfo()获取GDB所需的tcp连接端口
return;
*Output << "Triggered stack-limit breakpoint.\n";
*Output << "Start GDB and enter this command:\n";
*Output << " target remote :" << std::dec << info._tcpServer._tcpPort << "\n";
*Output << std::flush;
if (PIN_WaitForDebuggerToConnect(1000*KnobTimeout.Value())) //等待其余GDB窗口的连接
return;
*Output << "No debugger attached after " << KnobTimeout.Value() << " seconds.\n";
*Output << "Resuming application without stopping.\n";
*Output << std::flush;
}
这部分讲述了如何debug Pintool中的问题。(对Pintool的原理也能更了解
为此,pin使用了-pause_tool n 暂停n秒等待gdb连接。
../../../pin -pause_tool 10 -t /staff/shaojiemike/github/sniper_PIMProf/pin_kit/source/tools/ManualExamples/obj-intel64/stack-debugger.so -- obj-intel64/fibonacci.exe 1000
Pausing for 10 seconds to attach to process with pid 3502000
To load the debug info to gdb use:
*****************************************************************
set sysroot /not/existing/dir
file
add-symbol-file /staff/shaojiemike/github/sniper_PIMProf/pin_kit/source/tools/ManualExamples/obj-intel64/stack-debugger.so 0x7f3105f24170 -s .data 0x7f31061288a0 -s .bss 0x7f3106129280
*****************************************************************
注意gdb对象既不是pin也不是stack-debugger.so,而是intel64/bin/pinbin。原因是intel64/bin/pinbin是pin执行时的核心程序,通过htop监控可以看出。
# shaojiemike @ snode6 in ~/github/sniper_PIMProf/pin_kit/source/tools/ManualExamples on git:dev x [19:57:26]
$ gdb ../../../intel64/bin/pinbin
(gdb) attach 3502000
这时GDB缺少了stack-debugger.so的调试信息,需要手动添加。这里的add-symbol-file命令是在pin启动时打印出来的,直接复制粘贴即可。
(gdb) add-symbol-file /staff/shaojiemike/github/sniper_PIMProf/pin_kit/source/tools/ManualExamples/obj-intel64/stack-debugger.so 0x7f3105f24170 -s .data 0x7f31061288a0 -s .bss 0x7f3106129280
(gdb) b main #或者 b stack-debugger.cpp:94
gef➤ info b
Num Type Disp Enb Address What
1 breakpoint keep y <MULTIPLE>
1.1 y 0x00000000000f4460 <main> # 无法访问的地址,需要去除
1.2 y 0x00007f3105f36b65 in main(int, char**) at stack-debugger.cpp:94
(gdb) del 1.1
(gdb) c
stack-debugger.so的调试信息,无法设置断点。暂无
暂无
导言
frequently-used out-of-work urls
隐藏文件夹 .github , 里面放两个文件:
ISSUE_TEMPLATE.md
PULL_REQUEST_TEMPLATE.md
仓库有两个基础分支:
dev(默认分支)
master(用于发布)
通过pull request来合并新的代码:
协作者的代码通过pr合并到dev
dev通过pr合并到master
注意点:
merge 到 dev,使用squash merge
merge 到 master,使用普通的merge
永远不向master直接commit代码
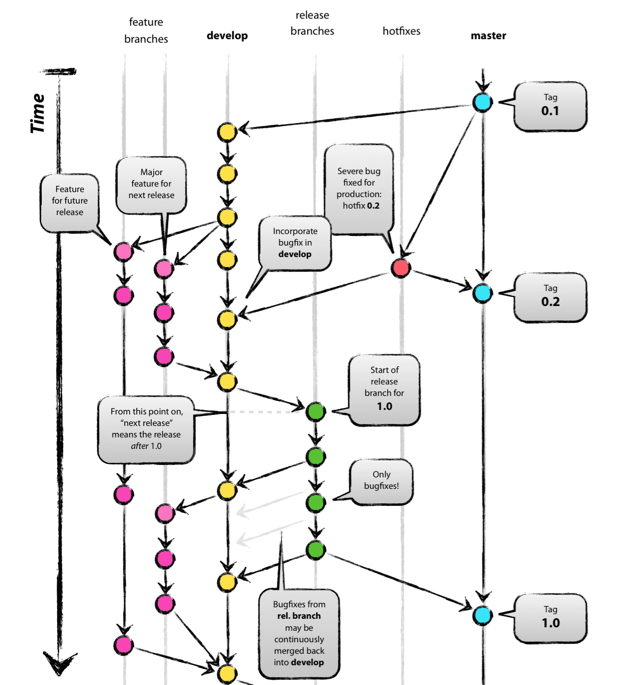
只有一个长期分支 master ,而且 master 分支上的代码,永远是可发布状态,
to do
github自带的,貌似比Travis CI好用
ctest 怎么写
可以使用 toc-generator
Settings > Actions > General里的Workflow permissions开启Read and write permissionsTravis CI 提供的是持续集成服务(Continuous Integration,简称 CI)。它绑定 Github 上面的项目,只要有新的代码,就会自动抓取。然后,提供一个运行环境,执行测试,完成构建,还能部署到服务器。
持续集成的好处在于,每次代码的小幅变更,就能看到运行结果,从而不断累积小的变更,而不是在开发周期结束时,一下子合并一大块代码。
.travis.ymlbefore_install:install 阶段之前执行
before_script:script 阶段之前执行
after_failure:script 阶段失败时执行
after_success:script 阶段成功时执行
before_deploy:deploy 步骤之前执行
after_deploy:deploy 步骤之后执行
after_script:script 阶段之后执行
passed:运行成功,所有步骤的退出码都是0
canceled:用户取消执行
errored:before_install、install、before_script有非零退出码,运行会立即停止
failed :script有非零状态码 ,会继续运行
Angular规范
| name | description | 实例 |
|---|---|---|
| feat: | 新功能(feature)。 | 打印函数 feat: Add print function for enhanced runtime information |
| fix/to: | 修复bug,可以是QA发现的BUG,也可以是研发自己发现的BUG。 | |
| fix: | 产生diff并自动修复此问题。适合于一次提交直接修复问题 | |
| to: | 只产生diff不自动修复此问题。适合于多次提交。最终修复问题提交时使用fix | |
| docs: | 文档(documentation)。 | |
| style: | 格式(不影响代码运行的变动)。 | |
| refactor: | 重构(即不是新增功能,也不是修改bug的代码变动)。 | |
| perf: | 优化相关,比如提升性能、体验。 | |
| test: | 增加测试。 | |
| chore: | 构建过程或辅助工具的变动。 | |
| revert: | 回滚到上一个版本。 | |
| merge: | 代码合并。 | |
| sync: | 同步主线或分支的Bug。 |
格式为:
revert:, followed by the header of the reverted commit. In the body it should say: This reverts commit <hash>., where the hash is the SHA of the commit being reverted.type的类型有:
feat: A new feature
chore: (琐事)Changes to the build process or auxiliary tools(辅助工具) and libraries such as documentation generation
scope:
commit 改变的位置,如果是多处写*
.结尾BREAKING CHANGE: with a space or two newlines. The rest of the commit message is then used for this.插件 vscode插件git-commit-plugin
命令行 husky + commitlint
npm cache clean --force #npm指令清除npm缓存
# 删除node_module包
npm install -g npm # npm 更新到最新
npm install -g n
n latest # node 更新
Note: the node command changed location and the old location may be remembered in your current shell.
old : /usr/bin/node
new : /usr/local/bin/node
To reset the command location hash either start a new shell, or execute PATH=$PATH"
PATH=/usr/local/bin/:$PATH
npm install -D standard-version
CHANGELOG.md 记录内容的配置
{
"types": [
{"type": "chore", "section":"Others", "hidden": false},
{"type": "revert", "section":"Reverts", "hidden": false},
{"type": "feat", "section": "Features", "hidden": false},
{"type": "fix", "section": "Bug Fixes", "hidden": false},
{"type": "improvement", "section": "Feature Improvements", "hidden": false},
{"type": "docs", "section":"Docs", "hidden": false},
{"type": "style", "section":"Styling", "hidden": false},
{"type": "refactor", "section":"Code Refactoring", "hidden": false},
{"type": "perf", "section":"Performance Improvements", "hidden": false},
{"type": "test", "section":"Tests", "hidden": false},
{"type": "build", "section":"Build System", "hidden": false},
{"type": "ci", "section":"CI", "hidden":false}
]
}
使用Standard Version
// 初次发布版本
npm run release --first-release
npm run release #(自动更新版本号,自动更新 CHANGELOG.md, 自动创建 git tag)
git push --follow-tags origin master

github-release-notes,以下简称 gren ,是用来一键向 github 发布 release notes 的工具。 https://zhuanlan.zhihu.com/p/99499246
https://blog.csdn.net/weixin_39586683/article/details/110643111
版本格式:主版本号.次版本号.修订号,版本号递增规则如下:
主版本号:当你做了不兼容的 API 修改, 次版本号:当你做了向下兼容的功能性新增, 修订号:当你做了向下兼容的问题修正。 先行版本号及版本编译信息可以加到“主版本号.次版本号.修订号”的后面,作为延伸。
写个github模板
set(Boost_USE_STATIC_LIBS ON)
set(Boost_DEBUG ON)
Boost_INCLUDE_DIR: 含有boost头文件的目录 Boost_LIBRARYDIR: 偏好的含有boost库的库目录
https://stackoverflow.com/questions/3897839/how-to-link-c-program-with-boost-using-cmake
http://c.biancheng.net/view/7772.html cache?
cmake boost install path
https://cloud.tencent.com/developer/ask/107360
设置boost-root 查看安装位置
Travis-CI 依赖软件包每次都要重新安装吗
https://stackoverflow.com/questions/57982945/how-to-apt-get-install-in-a-github-actions-workflow
Actions may have no Boost, where
Ctest add build/bin to test
Ctest https://www.cnblogs.com/hustcpp/p/12922998.html
暂无
还是ipcc的github组织的太烂了,需要学习一下
https://zhuanlan.zhihu.com/p/67620599
http://www.ruanyifeng.com/blog/2017/12/travis_ci_tutorial.html


洗漱台

淋雨间

卫生间(马桶(我们的变杂物间了

四人宿舍
某人的宿舍位~(一定不是我的)~


导言
如何高效找论文、读论文、总结论文、写PPT
高清多媒体界面(英语:High Definition Multimedia Interface,缩写:HDMI)是一种全数字化影像和声音发送接口,可以发送未压缩的音频及视频信号。HDMI可以同时发送音频和视频信号,由于音频和视频信号采用同一条线材,大大简化系统线路的安装难度。
HDMI是被设计来取代较旧的模拟信号影音发送接口。HDMI继承DVI的核心技术“传输最小化差分信号”TMDS,从本质上来说仍然是DVI的扩展。画面是以逐行的方式被发送,并在每一行与每祯画面发送完毕后加入一个特定的空白时间(类似模拟扫描线),并没有将数据“Micro-Packet Architecture(微数据包架构)”化,也不会只更新前后两帧画面改变的部分。每张画面在该更新时都会被完整的重新发送。
而DisplayPort一开始则面向液晶显示器开发,采用“Micro-Packet Architecture(微数据包架构)”传输架构,视频内容以数据包方式传送,这一点同DVI、HDMI等视频传输技术有着明显区别。
更多先进特性对比: https://www.cnbeta.com/articles/tech/1034975.htm
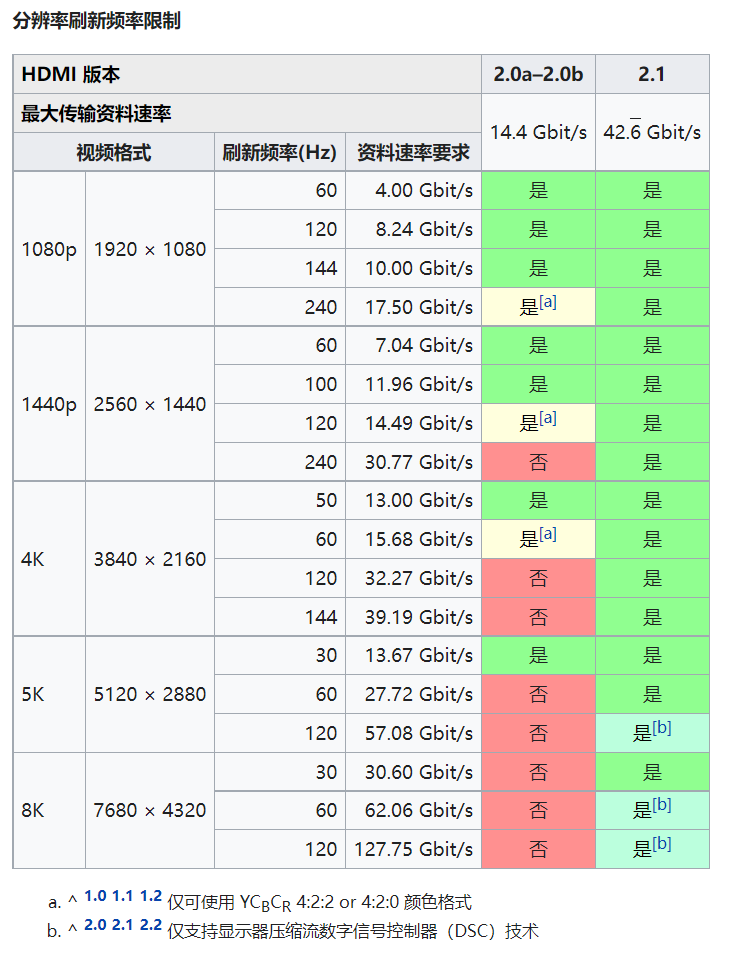
2009年5月28日提出,最高支持4K×2K(3840×2160p@24 Hz/25 Hz/30 Hz或4096×2160p@24 Hz)
2013年9月4日提出
2017年1月4日提出

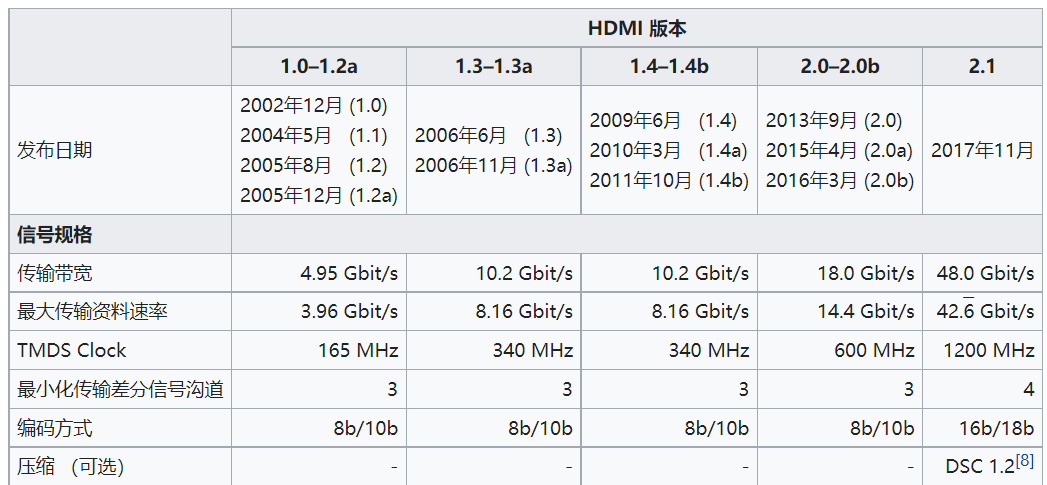
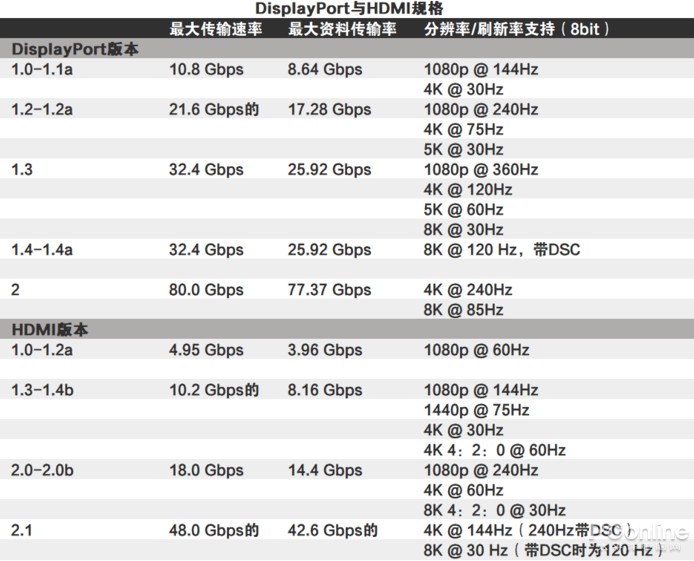
在早期的DP和HDMI标注中,数字信号大多使用8b/10b的比特率编码进行传输。在8b/10b编码模式下,意味着每8位数据在实际传输中需要10位的传输带宽,而这些多出来的冗余用来确保信号的完整性,这意味着他们只有80%的理论带宽可以用来传输数据。
而在最新的协议下,DP 2.0采用128b/132b进行传输,编码效率效率提升到97%,而HDMI 2.1则采用16b/18b进行传输,编码效率为88.9%。
加上同代的DP接口一般都拥有更高的传输速率,所以最新一代DP接口相对HDMI的拥有更高的数据速率。
每个像素都拥有红色,绿色和蓝色(RGB)这三个数据点,或者使用亮度,蓝色色度差和红色色度差(YCbCr / YPbPr)三个数据点
???
type c,同时支持dp1.2的视频输出 21.6Gbps
HDMI2.0 18Gbps

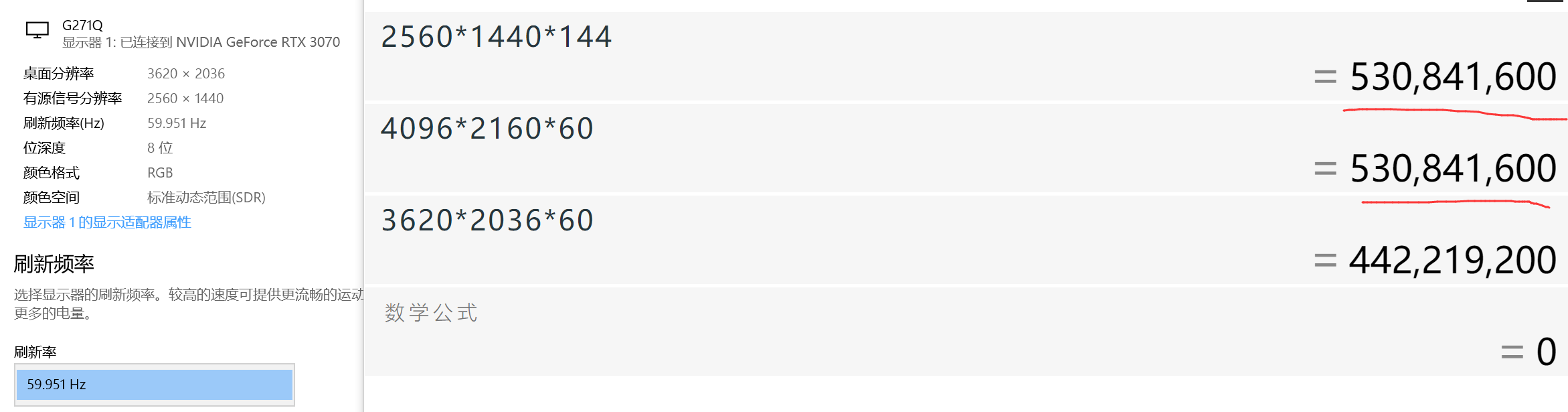
小米的显示器是DP1.4的接口 10bits
但是实际是8bits 下需要的带宽为为3*8*3440*1440*100Hz=11888640000bps 3种颜色每个8位。
11888640000bps / 0.8 = 14860800000bps 也不对,哪里有问题
买了根DP1.4的线,但是只有DP1.2的口
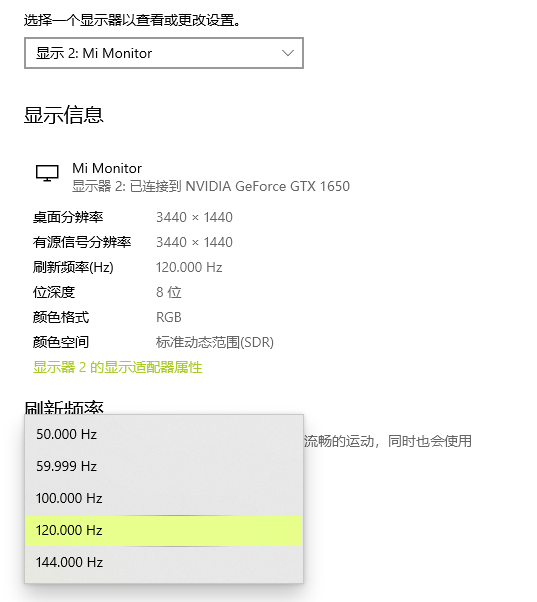 但是144Hz带不动,会花屏,或者闪烁。
但是144Hz带不动,会花屏,或者闪烁。
暂无
暂无
https://zh.wikipedia.org/wiki/USB#%E6%A0%87%E5%87%86USB%E6%8E%A5%E5%8F%A3
https://www.cnbeta.com/articles/tech/1034975.htm
DisplayPort(简称DP)是一个由PC及芯片制造商联盟开发,视频电子标准协会(VESA)标准化的数字式视频接口标准。该接口免认证、免授权金,主要用于视频源与显示器等设备的连接,并也支持音频、USB和其他形式的资料。
用于取代传统的VGA、DVI。 DisplayPort是第一个依赖数据包化资料传输技术的显示连接端口。
2006年5月发布。带宽10.8Gbps。DisplayPort 1.0的最大传输速度是8.64Gbit/s,长度是2米。已经废弃。
于2009年12月22日发布。它最大的改变是传输速度增加两倍到21.6Gbit/s(High Bit Rate 2(HBR2)mode),支持4K(4096X2160)60Hz,因此支授更高的分辨率、帧速率及色深。苹果公司设计的Mini DisplayPort亦兼容此标准。支持3D、支持多流(multi-streaming)。目前此版本是主流。
2014年9月15日,视频电子标准协会发布DisplayPort 1.3,带宽速度最高32.4 Gbps(HBR3),编码后有效带宽为25.92 Gbps,可支持4K(3840X2160)120hz、5K(5120X2880)60hz、8K(7680X4320)30hz。
2016年2月份最终版的DP 1.4连接端口规范,新标准基于2014年9月的DP 1.3规范,带宽不变但加入了显示压缩流(Display Stream Compression)技术、前向错误更正(Forward Error Correction)、高动态范围数据包(HDR meta transport),声道也提升到32声道1536 KHz采样率,一般情况下,DP1.4可提供4K 120Hz 8bit输出,若搭配DSC技术,可提供4K 144Hz 10bit输出。
DP1.4目前有严重BUG,无法进入bios或屏幕休眠后无法唤醒,20和30系显卡NVIDIA官方尚未放出修复更新,必须要显卡厂商自行修复,建议改用HDMI2.1
DP 2.0将最大链路速率提高到20 Gbps / lane,并具有更高效的128b / 132b信道编码,最大有效载荷为77.37 Gbps - 与DP 1.4a相比,增加了三倍。
这意味着DP 2.0是第一个以60 Hz刷新率支持8K分辨率(7680 x 4320)的标准,全彩色4:4:4分辨率,包括每像素30位(bpp),支持HDR-10。
单显示分辨率??? 一个16K(15360×8640)显示器@ 60Hz和30 bpp 4:4:4 HDR(带DSC)
一个10K(10240×4320)显示器@ 60Hz和24 bpp 4:4:4(无压缩) 双显示分辨率
两个8K(7680×4320)显示器@ 120Hz和30 bpp 4:4:4 HDR(带DSC)
两个4K(3840×2160)显示@ 144Hz和24 bpp 4:4:4(无压缩) 三重显示分辨率
三个10K(10240×4320)显示器@ 60Hz和30 bpp 4:4:4 HDR(带DSC)
三个4K(3840×2160)显示@ 90Hz和30 bpp 4:4:4 HDR(无压缩)
暂无
暂无
无