- parallel thread execution (PTX) 内联汇编有没有关系
- PTX是编程人员可以操作的最底层汇编,原因是SASS代码的实现会经常根据GPU架构而经常变换
- https://docs.nvidia.com/cuda//pdf/Inline_PTX_Assembly.pdf
- ISA指令手册 https://docs.nvidia.com/cuda/parallel-thread-execution/index.html#instruction-set
- SASS
- Streaming ASSembly(Shader Assembly?) 没有官方的证明
- 没有官方详细的手册,有基本介绍:https://docs.nvidia.com/cuda/cuda-binary-utilities/index.html#ampere
- https://zhuanlan.zhihu.com/p/161624982
- 从可执行程序反汇编SASS
- https://www.findhao.net/easycoding/2339.html
对于Ampere架构
指令方向
(instruction) (destination) (source1), (source2) ...
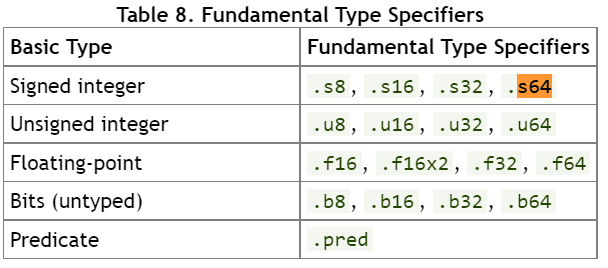
各种寄存器说明
* RX for registers
* URX for uniform registers
* SRX for special system-controlled registers
* PX for predicate registers
* c[X][Y] for constant memory
SASS的难点在于指令的后缀。由于手册确实,需要结合PTX的后缀查看
/*0028*/ IMAD R6.CC, R3, R5, c[0x0][0x20];
/*0030*/ IMAD.HI.X R7, R3, R5, c[0x0][0x24];
/*0040*/ LD.E R2, [R6]; //load
/*0028*/ IMAD R6.CC, R3, R5, c[0x0][0x20];
: multiply R3 with R5, sum with constant in bank 0, offset 0x20, store in R6 with
carry-out.
c[BANK][ADDR] is a constant memory。
.CC means “set the flags”
/*0030*/ IMAD.HI.X R7, R3, R5, c[0x0][0x24];
: multiply R3 with R5,
extract upper half, sum that upper half with constant in bank 0, offset 0x24, store in R7 with carry-in.
/*0040*/ LD.E R2, [R6]; //load
LD.E is a load from global memory using 64-bit address in R6,R7(表面上是R6,其实是R6 与 R7 组成的地址对)
R6 = R3*R5 + c[0x0][0x20], saving carry to CC
R7 = (R3*R5 + c[0x0][0x24])>>32 + CC
R2 = *(R7<<32 + R6)
寄存器是32位的原因是 SMEM的bank是4字节的。c数组将32位的基地址分开存了。
first two commands multiply two 32-bit values (R3 and R5) and add 64-bit value c[0x0][0x24]<<32+c[0x0][0x20],
leaving 64-bit address result in the R6,R7 pair
对应的代码是
kernel f (uint32* x) // 64-bit pointer
{
R2 = x[R3*R5]
}
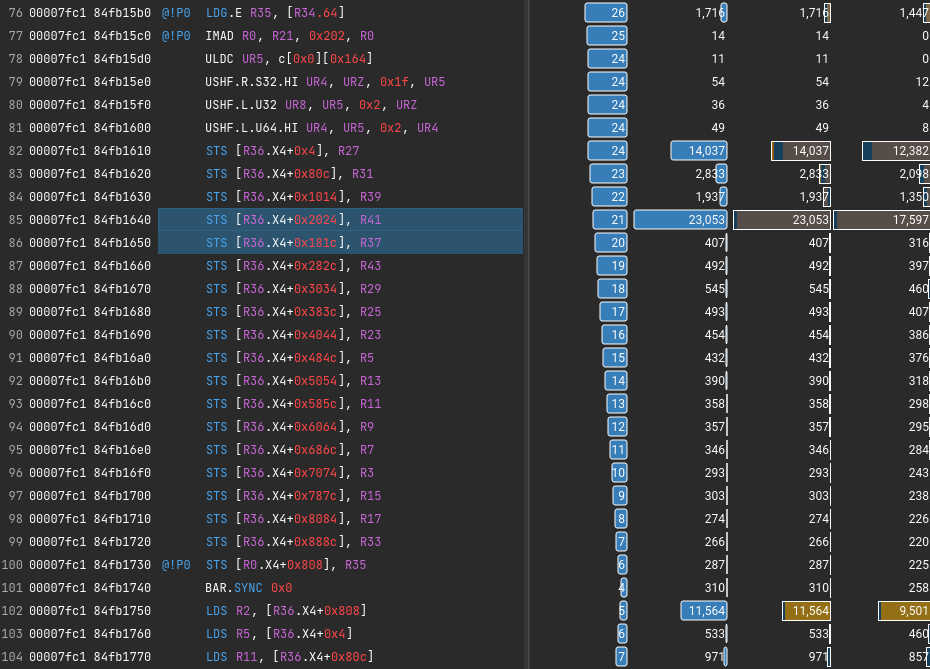
- LDG - Load form Global Memory
- ULDC - Load from Constant Memory into Uniform register
- USHF - Uniform Funnel Shift (猜测是特殊的加速shift)
- STS - Store within Local or Shared Window
观察 偏移
* 4
* 2060(delta=2056)
* 4116(delta=2056)
* 8228(delta=2 * 2056)
* 6172(delta=-1 * 2056)
* 10284(delta=2 * 2056)
* 12340(delta=2056)
可见汇编就是中间写反了,导致不连续,不然能隐藏更多延迟
那么这些寄存器是怎么来的呢?感觉就是写反了
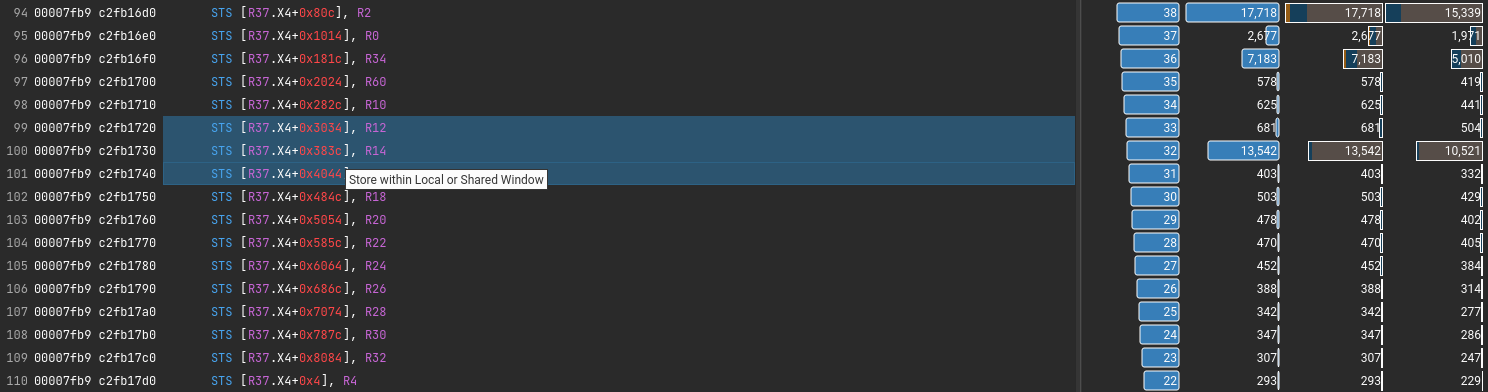
IMAD.WIDE.U32 R16, R16, R19, c[0x0][0x168]
LDG.E R27, [R16.64]
IMAD.WIDE R30, R19, c[0x0][0x164], R16
LDG.E R31, [R30.64]
IMAD.WIDE R32, R19, c[0x0][0x164], R30
LDG.E R39, [R32.64]
# important R41 R37
IMAD.WIDE R34, R19, c[0x0][0x164], R32
IMAD.WIDE R40, R19, c[0x0][0x164], R34
LDG.E R41, [R40.64]
LDG.E R37, [R34.64]
原因是前面是手动展开的,假如等待编译器自动展开for循环就不会有这个问题
暂无
暂无
https://forums.developer.nvidia.com/t/solved-sass-code-analysis/41167/2
https://stackoverflow.com/questions/35055014/how-to-understand-the-result-of-sass-analysis-in-cuda-gpu

 还是不行,猜测是
还是不行,猜测是


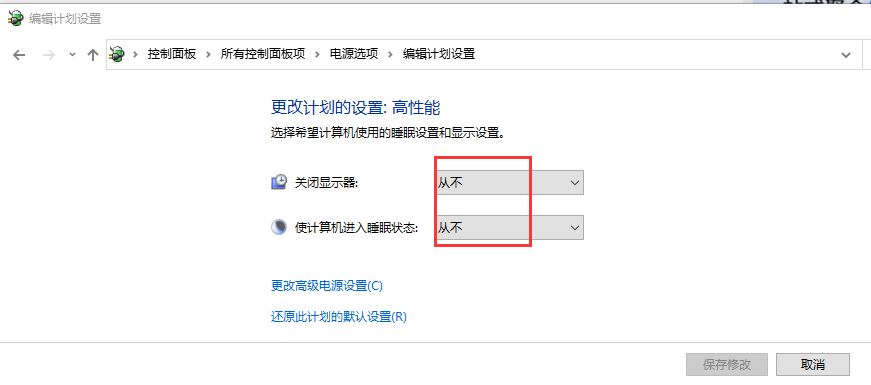

 但是不打开网站没有php返回,网页只能得到。
但是不打开网站没有php返回,网页只能得到。
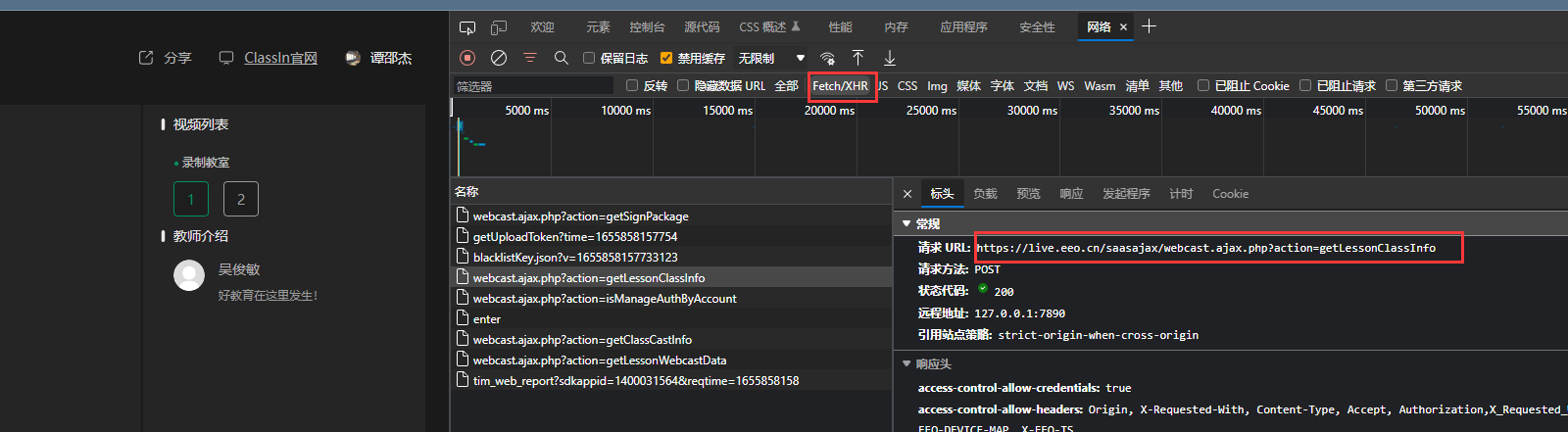
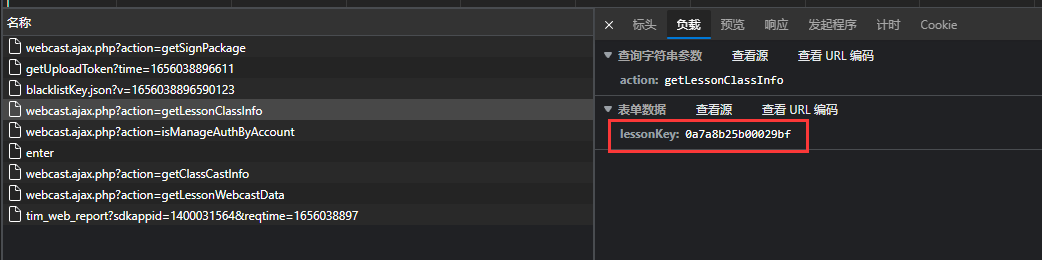
 可通过下面API返回需要的, 可以见
可通过下面API返回需要的, 可以见 data输入
data输入
 返回数据
返回数据